| Karel D. Robot Workshop - Aufgabenblatt 3 |
S. Spolwig |
Aufgabe 6 - Kanalsuche
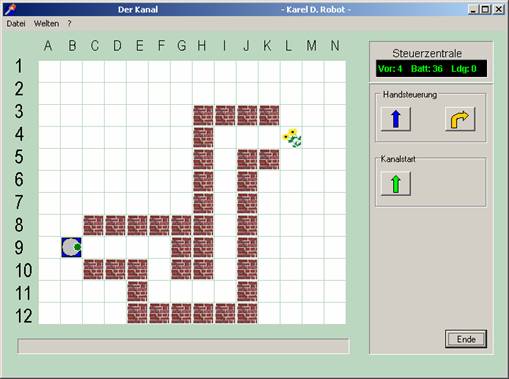
Die Abbildung zeigt Robby am Eingang zu einem Kanal. Am Ende des Kanals liegt eine Blume.Aufgabe
Programmieren Sie unter Verwendung der dargestellten Welt eine neue Roboter-Methode 'SucheBlume' so, dass der Roboter1. dem Kanal folgt, bis er zu der Blume kommt,
a. iterativ,
b. rekursiv.In jedem Fall ist der Roboter zuvor auf die angegebene Startposition zu setzen (das kann manuell oder im Event-Handler des Buttons geschehen).
Fügen Sie dazu der Klasse TMyRobot eine Methode SucheBlume hinzu. Verwenden Sie zur Implementation von SucheBlume die Methoden, die Sie bereits in TMyRobot integriert haben:
- Vor,
- LinksDrehen, RechtsDrehen,
- RechtsFrei, LinksFrei,
- VorneFrei.
2. die Blume holt und mit der Blume zum Startplatz zurückkehrt.
Dazu braucht man zusätzlich die Methoden
- Zurueck
und
- HindernisPruefen,
- Aufnehmen,
- Ablegen,
die aber erst in der Roboterklasse TKarel implementiert sind und von dieser Klasse geerbt werden können.
TMyRobot braucht also eine andere Oberklasse:TMyRobot = class(TKarel)
|
23. Feb. 06 GI-FIBBB HU Berlin Christian Steinbrucker u. T. Kreichauf |
|