| Karel D. Robot Workshop - Aufgabenblatt 2 |
S. Spolwig |
Aufgabe 5 a - Iteration
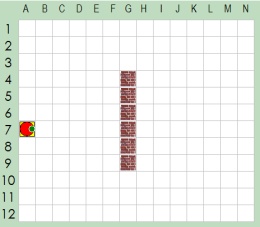
Bild 1: Zu Beginn der Bewegung
(Position A, "vorher")
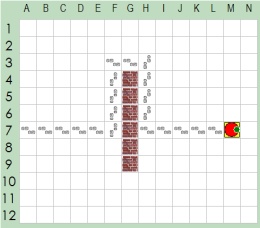
Bild 2: Am Ende der Bewegung
(Position B, "nachher")
Aufgabe
Fügen Sie der Klasse TMyRobot eine Methode UmDieSperre hinzu, die Robby von A nach B fahren läßt.
Die Positionen A und B haben immer den identischen Abstand von der Sperre.
Hinweise zur Implementation der neuen Methode:
- Verwenden Sie bei der Implementation von UmDieSperre als Steuerstrukturen Schleifen (Iterationen).
Dadurch wird der Ablauf von der Startposition links von der Sperre unabhängig.
- Verwenden Sie zur Implementation von UmDieSperre die Methoden, die Sie bereits in TMyRobot integriert haben.
- Vor,
- LinksDrehen,
- RechtsFrei,
- LinksFrei.
Hinweise zum Aufruf der neuen Methode:
- Legen Sie eine Komponente TSpeedButton in die Komponente UserPnl des Fensters ControlFrm.
- Rufen sie mit dem Buttonclickereignis dieses TSpeedButton die neue Methode UmDieSperre des Roboters auf.
Aufgabe 5 b - Rekursion
Verwenden Sie als Steuerstrukturen Selbstaufrufe (Rekursionen).
|
23. Feb. 06 GI-FIBBB HU Berlin Christian Steinbrucker u. T. Kreichauf |
|